- ROBÓTICA ESCOLAR -
Proyecto Tecnológico para 4º de ESO.
"COCHE EVITA-CAÍDAS" Acerca de este proyecto
Este Proyecto Tecnológico se ha realizado en TECNOLOGÍA de 4º de ESO del IES J. Romero Murube.
Se desarrolló simultáneamente con el "coche evita-paredes" ya que a nivel de circuitería son prácticamente iguales. También se realizó en dos fases:
- En la Fase I se construyó el coche y se usó un sistema de control puramente eléctrico.
- En la Fase II se utilizó una tarjeta controladora "Proyectos
Picaxe-18 de alta potencia".
Con ella se pudieron programar acciones más sofisticadas a la hora de evitar caídas desde el borde de una mesa.
FASE I. "Coche evita-caídas. Control eléctrico."
Propuesta de trabajo
Enunciado de la propuesta
Diseñar y contruir un coche capaz de evitar caídas por un precipicio (borde de una mesa) cuando lo detecte.
Lo llamaremos "Coche evita-caídas".
Condiciones de la propuesta
- Debe tener dos motores independientes con gran reducción, uno para cada rueda.
- Una rueda loca permitirá que el coche pueda girar según funcione un motor u otro.
- Se utilizará una pila de petaca.
- Se utilizarán dos conmutadores fin de carrera modificados adecuadamente para detectar la ausencia de suelo.
- Debe poder alojar una placa protoboard de las que se usan en las prácticas para poder realizar otros tipos de pruebas en el taller de Tecnlogía.
Esquema del circuito eléctrico (fase I) del coche
- Cuando el circuito se conecta, ambos motores funcionan y el coche avanza.
- Si detecta que ho hay suelo (borde de la mesa) por la izquierda, se detiene el motor derecho y esto provoca que el coche gire a la derecha intentando evitar la caída.
- Si detecta que no hay suelo (borde de la mesa) por la derecha, se detiene el motor izquierdo y esto provoca que el coche gire a la izquierda intentando evitar la caída.

Fotos de un proyecto (fase I) finalizado
En la primera foto tenemos una vista de conjunto.
Pueden verse los conmutadores fin de carrera (pulsados debido a que "hay suelo"), el interruptor general y las ruedas.
La base es lo suficientemente grande como para alojar una placa protoboard sobre la que se hacen distintas prácticas.

En esta segunda foto se ve con más detalle el sensor de contacto, que en nuestro caso es un conmutador fin de carrera ampliado con un trozo de alambre.
Cuando el fdc detecta que no hay suelo, deja de estar pulsado.

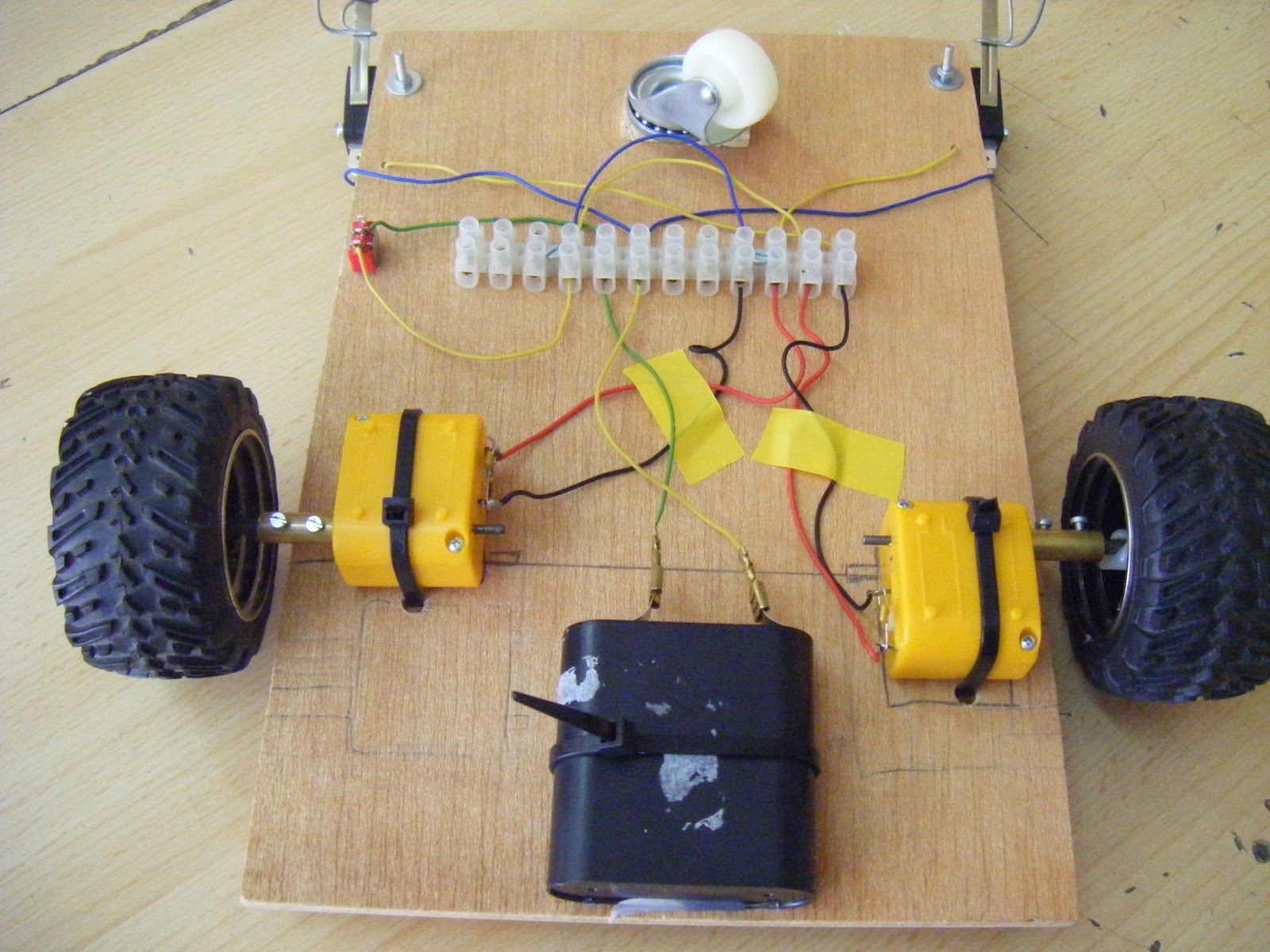
En la última foto tenemos una vista inferior del coche.
Puede verse en la misma los dos motores con reductora con sus respectivas ruedas, la rueda loca, pila de petaca, interruptor y regleta de conexiones.
Vídeo de un proyecto (fase I) finalizado.
Este vídeo muestra el funcionamiento de uno de los coches evita-caídas construidos.
Tiene el inconveniente de que si se encuentra una pared de frente no es capaz de sortearla, aunque sí que se detiene y no cae. Esto queda perfectamente resuelto en la fase II cuando se robotiza el coche.
FASE II. "Coche evita-caídas robotizado"
Propuesta de trabajo
Enunciado de la propuesta
Ampliar el proyecto anterior robotizando el coche para que sea capaz de evitar los precipicios más eficientemente.
Lo llamaremos "Coche evita-caídas robotizado".
Condiciones de la propuesta
- El proceso de control se hará con una tarjeta controladora "Proyectos Picaxe-18 de alta potencia".
- Cuando el coche detecte que no hay suelo, debe detenerse, ir hacia atrás y girar para evitar el precipicio.
- Se considerará que el coche funciona correctamente si es capaz de dar una vuelta por una mesa de trabajo sin caer por ningún borde ni quedar atrapado.
Esquema del circuito eléctrico (fase II) del coche
Se utilizó una tarjeta controladora "Proyectos Picaxe-18M2 de alta potencia".
Los dos sensores (fin de carrera) se conectaron a dos entradas. A partir de su lectura podemos saber si el fdc detecta suelo (pulsado) o está en un precipicio (no pulsado).
Los dos motores se conectaron a los dos pares de salidas reversibles para motores. Ello permite mover cada uno individualmete hacia adelante o hacia atrás.

Nota
A nivel de circuitería, la única diferencia con el coche evita-paredes es que los sensores usan la salida normalmente cerrada del fin de carrera debido a que casi siempre están cerrados. Se evita así menos consumo de corriente (ver también nota del coche evita-paredes).
Pueden verse más detalles de la tarjeta controladora en el siguiente enlace:
Tarjeta controladora "Proyectos Picaxe 18M2 de alta potencia" (chi-035a).
Vídeo de un proyecto (fase II) finalizado
En este vídeo vemos ahora como el coche funciona mejor a la hora de escapar de los bordes de la mesa.
Básicamente cuando detecta que no hay suelo, se para, retrocede y gira en sentido opuesto al precipicio para evitar la caída.
Programa utilizado en el proyecto (fase II)
Básicamente el programa hace lo siguiente:
- Si los conmutadores fin de carrera (fdcD y fdcI) están pulsados (detectan suelo), los dos motores avanzan.
- Si el fin de carrera derecho (fdcD) pasa a estar no pulsado (precipicio en lado derecho) entonces
- se detienen los motores,
- el coche retrocede un poco (motores hacia atrás),
- se detiene de nuevo
- y por último el motor izquierdo gira hacia atrás lo que hace que el coche rote hacia la derecha.
- Por último continúa avanzando ya que ambos fdc volverán a estar pulsados.
- Si el fin de carrera izquierdo (fdcI) pasa a estar no pulsado, todo es simétrico respecto al punto anterior cambiando derecha por izquierda y viceversa.
En el siguiente enlace se muestra el programa que utilizamos para estas tareas:
2 comentarios:
y los materiales para hacer este proyecto
Los materiales se pueden deducir de las condiciones del proyecto, los esquemas y las imágenes, aunque te los detallo.
Material eléctrico
- Pila
- Dos motores con bastante reducción, para que las ruedas vayan lentas y dos condensadores (220nF) en paralelo para quitar ruído eléctrico
- Dos finales de carrera; mejor si tienen la chapita bien alargada
- Interruptor general
- Cable y fichas de empalme (esto último por comodidad)
- Para la segunda fase, tarjeta controladora "Proyectos PICAXE-18 de alta potencia"
Resto de material
- Tablita de madera (en mi caso contrachapado de 4mm) para la base y algún listón pequeño para adaptar los finales de carrera
- Elementos de unión (tornillos, bridas, etc)
- Alambre para alargar las plaquitas de los finales de carrera
- Dos ruedas para los motores
- Una rueda loca
Creo que más o menos se ve todo en las imágenes y que no se me olvida nada, saludos
Publicar un comentario